隨著工業(yè)4.0和智能制造的快速發(fā)展,信息物理系統(tǒng)(CPS)作為物理過程與計算、通信技術深度融合的核心平臺,在智能工廠、智慧城市、自動駕駛等領域發(fā)揮著關鍵作用。CPS的運行環(huán)境常常面臨不確定性、外部干擾和網(wǎng)絡延遲等挑戰(zhàn),這要求控制系統(tǒng)不僅要具備高精度和實時性,還需具備強大的魯棒性。集成魯棒模型預測控制(Robust Model Predictive Control, RMPC)架構應運而生,它結合了模型預測控制的多步優(yōu)化能力和魯棒控制的抗干擾特性,為CPS的穩(wěn)定和高效運行提供了有力支持。本文將從CPS的基本概念出發(fā),探討集成RMPC架構的設計原理、關鍵技術及其在網(wǎng)絡技術服務中的應用前景。
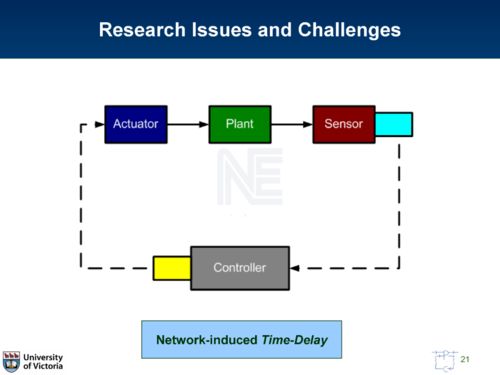
信息物理系統(tǒng)通過傳感器、執(zhí)行器和通信網(wǎng)絡將物理世界與信息空間緊密連接,形成一個閉環(huán)反饋系統(tǒng)。在CPS中,控制算法需要處理來自物理環(huán)境的實時數(shù)據(jù),同時應對模型不確定性、參數(shù)波動和外部擾動。傳統(tǒng)的控制方法如PID控制雖然簡單易用,但在復雜動態(tài)系統(tǒng)中往往難以保證性能。模型預測控制(MPC)通過在線優(yōu)化未來一段時間內的控制輸入,能夠處理多變量約束和動態(tài)響應,但其對模型精度的依賴較高。為此,魯棒MPC架構被引入,它利用集總不確定性描述或隨機優(yōu)化方法,確保系統(tǒng)在不確定條件下的穩(wěn)定性和安全性。例如,通過min-max優(yōu)化或 tube-based 方法,RMPC可以有效地抵消擾動影響,適用于CPS中的關鍵應用,如電網(wǎng)調度或機器人導航。
集成RMPC架構的核心在于將魯棒性與預測控制相結合。這通常涉及模型建立、不確定性量化、優(yōu)化求解和實時調整等步驟。在模型建立階段,需考慮CPS的離散或連續(xù)動態(tài),并引入不確定性集,如多面體或橢球體描述。在優(yōu)化求解中,RMPC采用魯棒優(yōu)化技術,如線性矩陣不等式(LMI)或場景方法,以最小化最壞情況下的性能指標。隨著網(wǎng)絡技術的發(fā)展,RMPC架構可以集成云計算和邊緣計算服務,實現(xiàn)分布式控制和數(shù)據(jù)共享。例如,在工業(yè)物聯(lián)網(wǎng)中,RMPC可以通過網(wǎng)絡服務獲取實時傳感器數(shù)據(jù),進行遠程優(yōu)化,并將控制指令下發(fā)至執(zhí)行器,從而提升系統(tǒng)的響應速度和可靠性。
網(wǎng)絡技術服務在集成RMPC架構中扮演著重要角色。現(xiàn)代CPS依賴于高速、低延遲的通信網(wǎng)絡,如5G或工業(yè)以太網(wǎng),以確保控制循環(huán)的實時性。網(wǎng)絡服務提供數(shù)據(jù)采集、傳輸、存儲和分析功能,支持RMPC的在線實施。例如,通過云平臺,RMPC可以訪問歷史數(shù)據(jù)和機器學習模型,以改進不確定性預測;網(wǎng)絡安全措施如加密和認證機制,能夠保護控制指令免受網(wǎng)絡攻擊。在實際應用中,這種集成架構已成功用于智能交通系統(tǒng),其中RMPC優(yōu)化車輛隊列控制,網(wǎng)絡服務處理車聯(lián)網(wǎng)通信,從而提高道路安全和效率。
信息物理系統(tǒng)的集成魯棒模型預測控制架構結合了先進的控制理論和網(wǎng)絡技術,為應對不確定環(huán)境提供了可靠解決方案。隨著人工智能和大數(shù)據(jù)技術的發(fā)展,RMPC有望進一步融合自適應學習和分布式優(yōu)化,推動CPS在更多領域的應用。網(wǎng)絡服務將不斷演進,提供更智能、安全的支撐,助力實現(xiàn)工業(yè)自動化和智慧社會的愿景。研究者和工程師應關注這一領域的創(chuàng)新,以提升系統(tǒng)性能和魯棒性。